极飞XP2020款无人机系统如何实现自动避障?
XP 2020 旗舰版搭载 MIMO 4D 毫米波雷达,能够实现对障碍物三维位置和相对速度的四维感知, 构建以无人机为中心的立体地图模型,全面准确地预判所有障碍物的行动,从而快速精准绕行,保证 飞行安全。 为了更好的体验及安全使用避障功能,请严格按此说明进行操作。
1.固件升级
使用避障功能前需对 XP 2020 农业无人机相 关固件进行升级:


- 极飞农业 APP”版本 升级至 V 1.2.2 以上
- 飞行控制器版本 升级至 V 1.86.267 以上
- 通信系统版本 升级至 V 5.0.18 以上
- 雷达版本 升级至 V 1.0.1.22 以上
参数设置
选择需要执行的航线区域后,点击“速度 (m/ s)”,在飞行参数界面调整速度及开启防撞 功能。
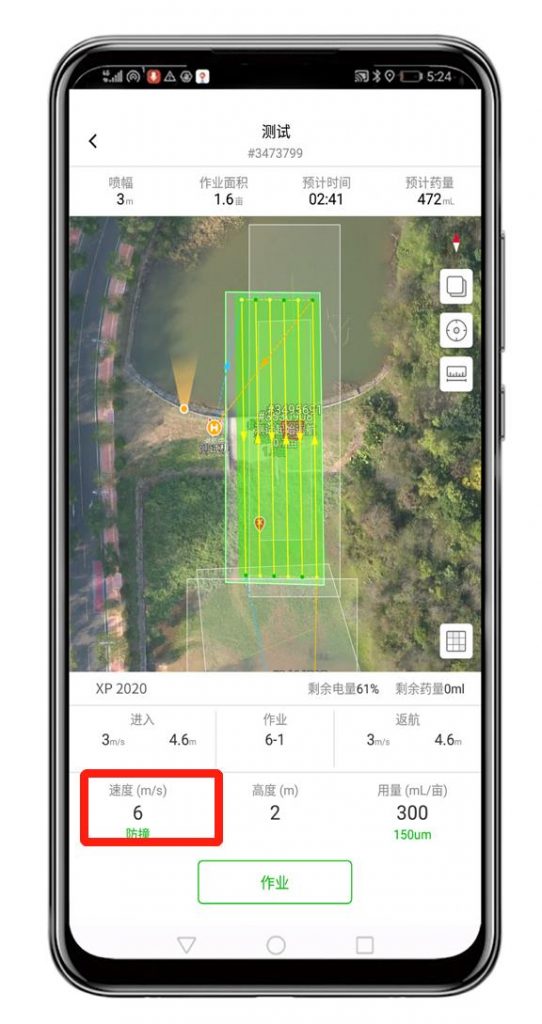
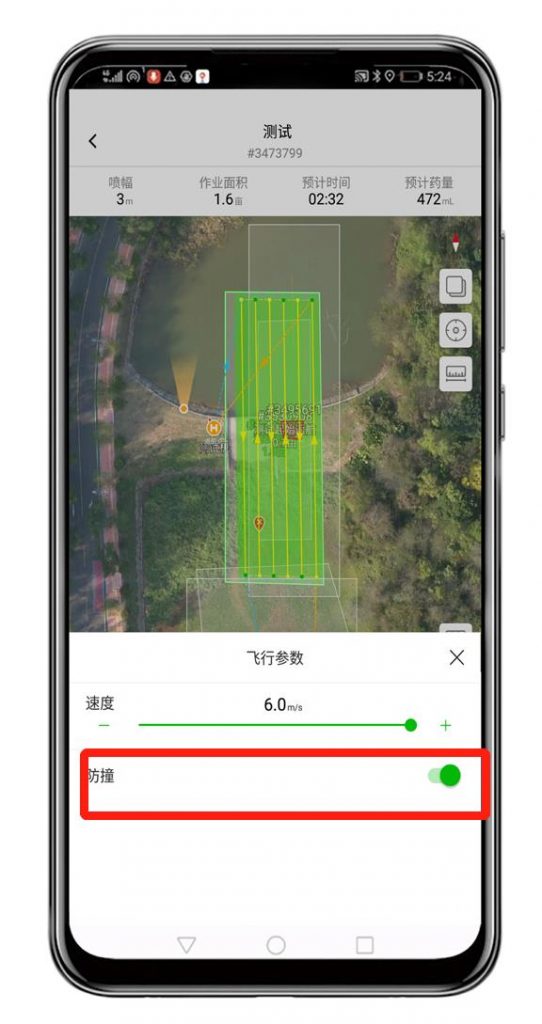
开启防撞功能后,飞行速度最大为 6m/s。
障碍物要求
障碍物半径需在 1cm 以上(因被测物体材质,形状,大小,所处环境的不同而有所差异)。 无人机离地高度建议在 1.5m 以上,同时障碍物高度建议比无人机高度高出 1m 以上。
注:不能用人体或其他活物当障碍物检测无人机的避障功能。 安全避障距离为 2.5 米(无人机刹车至稳定悬停后桨尖与障碍物之间的距离)。
声明:本网站的所有创作内容,包括但不限于文章、视频、音频等,均为本网站的原创作品,除非特别注明或标明出处。未经本网站事先书面同意,任何个人或组织严禁以任何形式复制、盗用、采集或发布本网站的内容到任何网站、书籍或其他各种媒体平台。如果本网站的内容侵犯了原著者的合法权益,请您联系我们,我们将积极采取必要措施进行处理。