

文章目录[隐藏]
系统组成
- 载机平台(v40)
- GNSS RTK系统(云基站、移动基站、测绘器等)
- 电力系统(发电机、电池、充电器)
- 操作系统(极飞农业APP、遥控器、ACS2单手控、ACB1等)
- 管理平台(运营管理系统、监控系统)
V40结构系统
- 双旋翼结构,全新架构平台
- 防滚架 + 轻量化机身结构
- 头壳散热进风口
- 机臂折叠,物理自锁安全扣

动力系统 数据流程分析
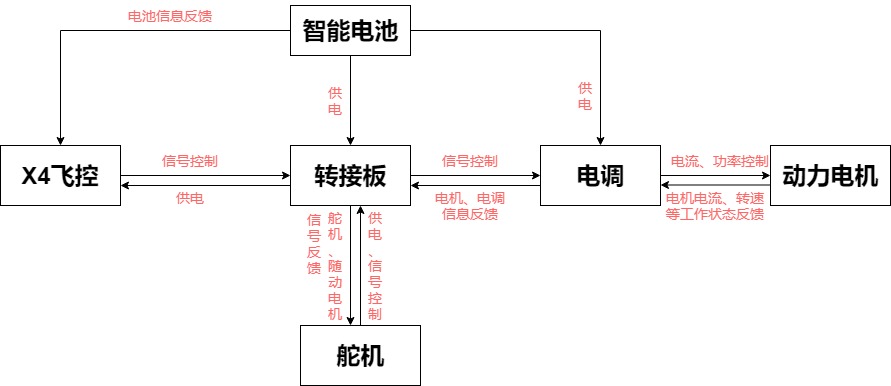
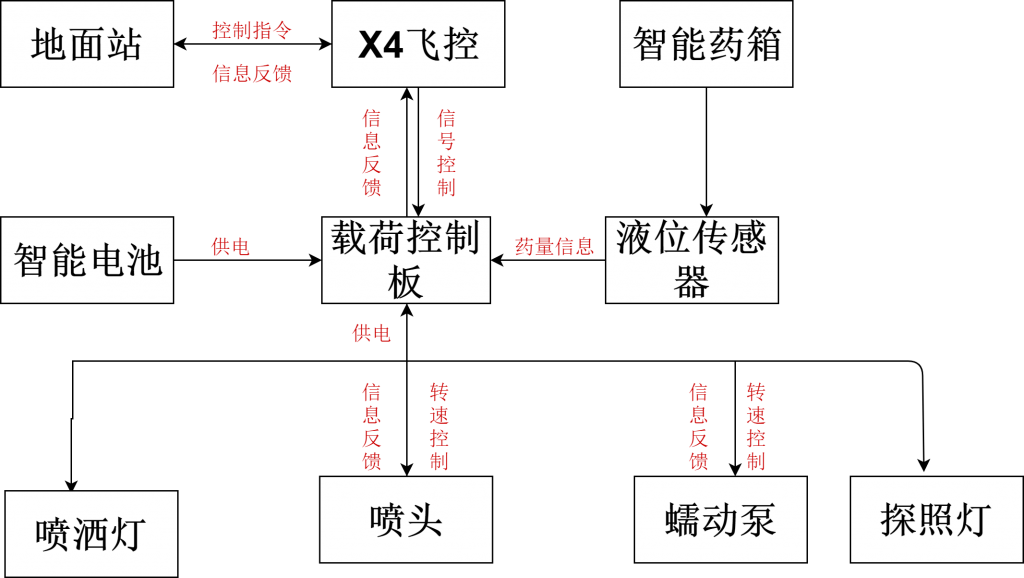
智能电池给转接板和电调供电,转接板给飞控供电,飞控发送控制信号给转接板,转接板将信号传输给电调,电调控制动力电机的功率并同时将动力电机的工作状态信息反馈给电调;电调再将电机,电调的信息反馈给转接板,转接板将信息反馈给飞控。同时转接板会给舵机供电并发出控制信号给舵机,舵机会将自身信息反馈到转接板,转接板将信号反馈给飞控。
电调
全新一代动力电调利用螺旋桨风场提供强 制风冷条件,优化散热鳍设计,在额定功 率提高100%条件下,整机温升降40%。

电机/舵机
- 全新动力系统,采用大直径无刷电机,配 合47寸高效螺旋桨,爆发强劲动力,单电 机最大拉力较20款提升一倍(100%), 达到42kg单臂最大拉力。
- 舵机座减振结构
- 舵机倾转系统,两级行星齿轮减速
- 防冲击连杆设计
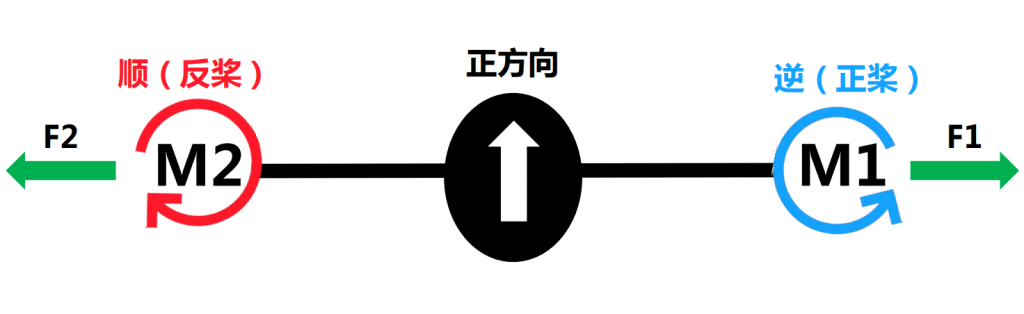
螺旋桨排布原理
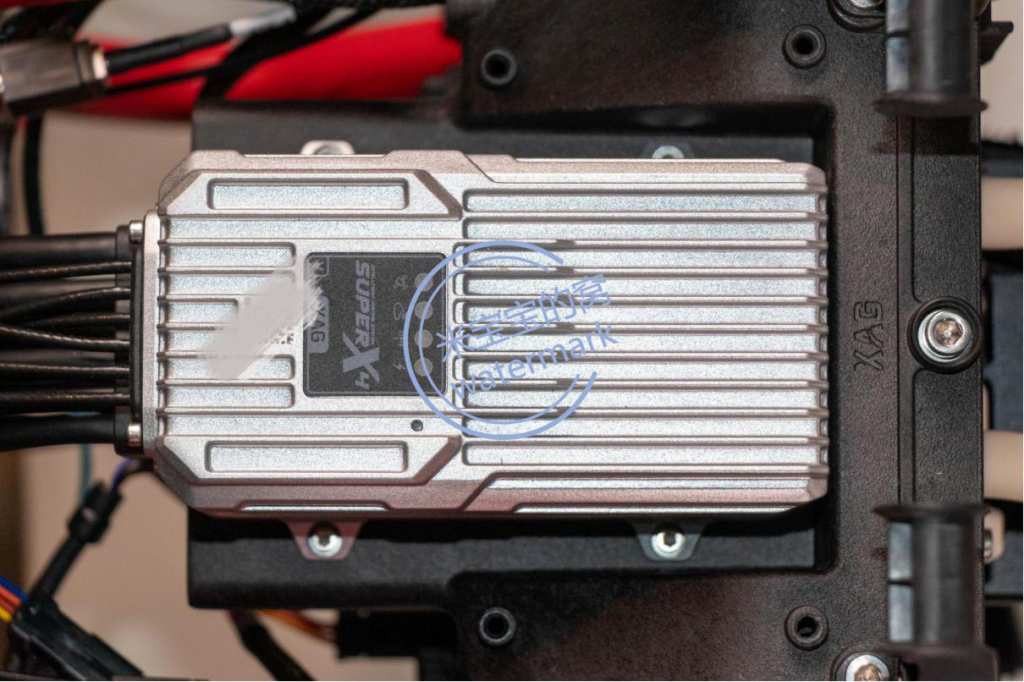
SUPERX® 4 智能控制系统
- 高度集成化
- 强大运算能力
- 接口丰富,扩展性更强
- 搭载最新研发NavOS系统,支持应用扩展
- 减振结构优化
- 体积减小
- 传感器冗余
- 抗振性增加
飞控及感知系统
PSL飞行员视觉影像
- 高清、低延时视频图传
- 前方环境实时感知

前置动态雷达避障系统
- 四维感知 精准绕障
- 精准探测障碍物距离、位置、运动方向及速度
- 前置动态雷达多路收发,同时探测 128个障碍物
- 40 米远距探测,1 厘米精准感知

地形模块
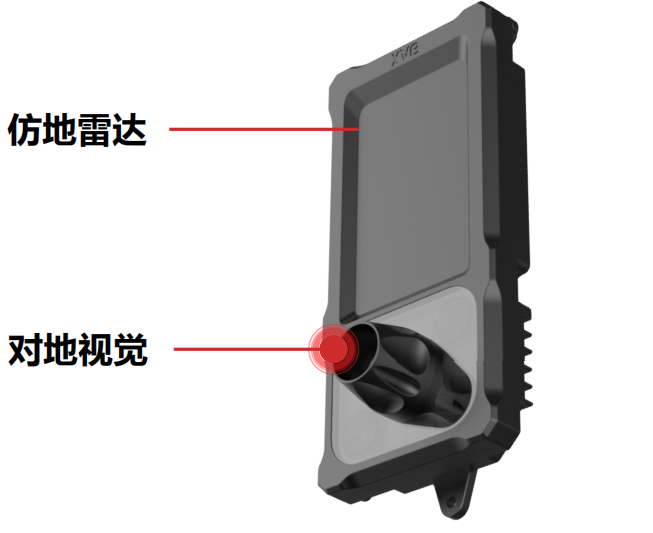
地形模块工作时,摄像头会连续拍摄地面照片,对比特征点,计算飞机位置移动速度!地形模块需要注意镜头、 LED 补光灯位置的干净,若在水泥地面或地面纹理较少甚至无纹理的位置,地形模块可能会报错!
RTK定位系统
什么是GPS定位?
全球定位系统(英语:Global Positioning System,通常简称GPS),又称全球卫星定位系统,是一个中距离圆型轨道卫星导航系统。它可以为地球表面绝大部分地区(98%)提供准确的定位、测速和高精度的时间标准。系统由美国国防部研制和维护,可满足位于全球任何地方或近地空间的军事用户连续精确的确定三维位置、三维运动和时间的需要。该系统包括太空中的24颗GPS卫星;地面上1个主控站、3个数据注入站和5个监测站及作为用户端的GPS接收机。最少只需其中3颗卫星,就能迅速确定用户端在地球上所处的位置及海拔高度;所能收联接到的卫星数越多,解码出来的位置就越精确。
什么是RTK定位?
RTK(Real - time kinematic,实时动态)载波相位差分技术,是实时处理两个测量站载波相位观测量的差分方法,将基准站采集的载波相位发给用户接收机,进行求差解算坐标。这是一种新的常用的卫星定位测量方法,以前的静态、快速静态、动态测量都需要事后进行解算才能获得厘米级的精度,而RTK是能够在野外实时得到厘米级定位精度的测量方法,它采用了载波相位动态实时差分方法,是GPS应用的重大里程碑,它的出现为工程放样、地形测图,各种控制测量带来了新的测量原理和方法,极大地提高了作业效率。
RTK基站的工作原理
基准站建在已知或未知点上;基准站接收到的卫星信号通过无线通信网实时发给用户;用户接收机将接收到的卫星信号和收到基准站信号实时联合解算,求得基准站和流动站间坐标增量(基线向量)。站间距30公里,平面精度1-2厘米。
定位模式及含义
- NONE:表示无信号状态(无 GPS 信号或 GPS 数量太少)
- Single: 代表单点状态(有 GPS 信号无 差分数据)
- Float: 表示浮动状态(共用卫星数不足、共用 GPS 信号不稳定或接收到的差分数据不稳定)
- RTK: 表示实时、高精度定位状态(共用 GPS 信号稳定且接收到的差分数据稳定)
RTK 延时是指无人机上次收到可用差分数据到此刻的时间差,RTK 延时的正常范围值是在 0~60 秒内,当 RTK 延时大于 60 秒时,无人机的定位精度会出现较大偏差(18 款无人机是 10s)
无人机电力系统
2021款无人机标配的是B13960S智能电池
- 电池(B13960S)
- 额定容量:20Ah(962Wh)
- 额定输出:48.1V/130A
- 标准充电:56.6V/50A
- 工作温度:10-45℃
特点:
电芯性能 容量增加10%,增加续航时间 充电倍率提升50%,充电时间缩短25% 放电倍率提升30%
- 结构设计变化,电池散热优化,使用寿命延长
- 电池插头上搭载温度传感器,可有效防止过热情况下继续工作
- 电流通过量250A,提升100%
- 电池容量增加 10%:续航时间增加
- 放电倍率提升 50%
- 充电倍率提升:充电时间缩短 20%
- bms 电池管理系系统,确保电池使用安全
尾插结构
- 结构设计变化,信息接口居中,左右各三片供电接头
- 触⽚⾯积增加
- 增加防打⽕设计,进⼀步提⾼⻜⾏安全性
- 内置NTC传感器
蠕动泵和离心喷头
- φ70mm大盘径喷盘,无流槽新齿形
- 无刷电机,扭力大,转速高
- 双泵10L/min超大流量
- 最大喷幅10米
睿喷系统数据流分析:
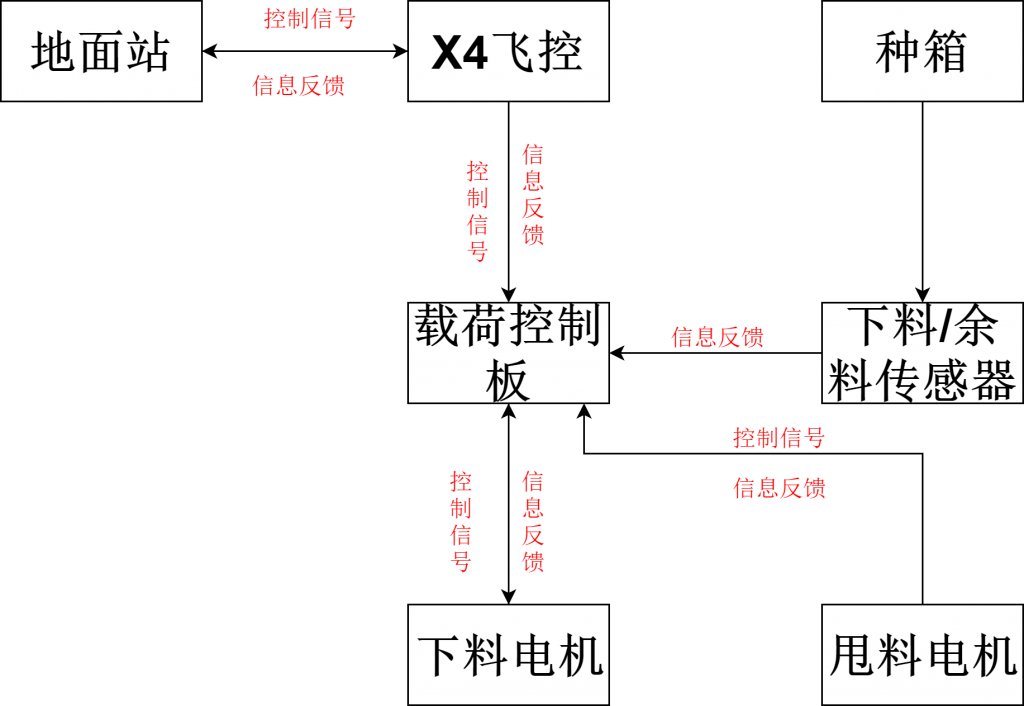
睿播系统:
组成:料箱、螺旋送料装置、甩盘组成将种子、固体颗粒精确播撒到所需位置
特点:
- 双甩盘系统
- 播撒均匀,撒料量更大
- 播幅 8-10m
- 出料量精准,精度±5%
- 出料量线性好
- 空间利用更合理
睿播数据流分析
睿图系统
睿图特点:
- 快速生成测绘成果,包括正射影像和三维场景(3D点云)
- 边界识别
- 障碍物识别
- 地图数据服务
- 低空广角测绘,毫秒级别同步,5~10cm平面测绘精度
- 边缘AI技术, 使用NPU进行深度学习计算加速,实现农业场景的2D和3D的对象化,能更智能的帮助农业无人机进行规划作业
- 在嵌入式端快速建图,无需携带电脑或云端建图服务支持



P30起飞测试的时候,飞机侧翻是怎么回事
如果你描述的是飞起来后(离地后)侧翻,一般情况下是动力系统异常,需要看飞控数据分析原因。
如果没有电路损坏的情况下,也可以通电后查看动力系统界面有无异常信息,建议拷贝飞控日志进行数据分析。